 平台热线
平台热线



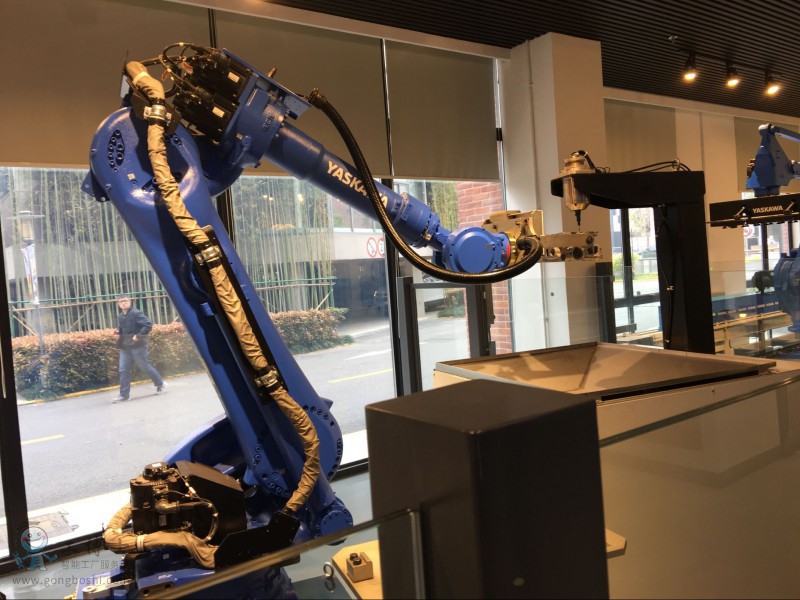
点焊机器人主要用于汽车整车的焊接工作,生产过程由各大汽车主机厂负责完成。国际工业机器人企业凭借与各大汽车企业的长期合作关系,向各大型汽车生产企业提供各类点焊机器人单元产品并以焊接机器人与整车生产线配套形式进入中国,在该领域占据市场主导地位。
二、安川点焊机器人具体利用原理
点焊机器人系统利用金属与金属之间的接触电阻,通过强大的电流,使金属接触部分局部融化,形成金属间的连接。机器人控制器可以根据不同材质、不同厚度确定和调整焊接压力、焊接电流等参数,具有焊接效率高、变形小,不需添加焊接材料等特点。
三、安川点焊机器人主要技术指标:
|
结构
|
全关节型
|
||
|
自由度
|
6轴:
|
||
|
驱动
|
直流伺服电动杠
|
||
|
运动范围
|
腰转
|
范围± 135°
|
*大速度50°/s
|
|
大臂转
|
前 50°,后30°
|
45°/s
|
|
|
小臂转
|
下 40°,上20°
|
40°/s
|
|
|
腕摆
|
± 90°
|
± 80°/s
|
|
|
腕转
|
± 90°
|
± 80°/s
|
|
|
腕捻
|
± 170°
|
± 80°/s
|
|
|
*大负荷
|
65kg
|
||
|
重复精度
|
± 1mm
|
||
|
控制系统
|
计算伺服控制, 6轴同时控制
|
||
|
轨迹控制系统
|
PTP及CP
|
||
|
运动控制
|
直线插补
|
||
|
示教系统
|
示教再现
|
||
|
内存容量
|
1280步
|
||
|
环境要求
|
温度 0~45℃ 湿度 20%~<90%RH
|
||
|
电源要求
|
220V交流,50Hz三相
|
||
|
自重
|
1500kg
|
||
四、安川点焊机器人的分类:
|
分 类
|
特 征
|
用途
|
|
垂直多关节型(落地式
|
工作空间/安装面积之比大,持重多数为1000N左右,有时还可以附加整机移动自由度
|
主要用语增强焊点作业
|
|
垂直多关节型(悬挂式)
|
工作空间均在机器人的下方
|
车体的拼接作业
|
|
直角坐标型
|
多数为3、4、5轴,适合于连续直线焊缝,价格便宜
|
|
|
定位焊接用机器人(单向加压)
|
能承受500KG加压反力的高刚度机器人。有些机器人本身带加压作业功能
|
车身底板的定位焊
|
五、安川点焊机器人及其系统的基本构成:
点焊机器人虽然有多种结构形式,但大体上都可以分为 3 大组成部分,即机器人本体、点焊焊接系统及控制系统,目前应用较广的点焊机器人,其本体形式为直角坐标简易型及全关节型。前者可具有 1 ~ 3 个自由度,焊件及焊点位置受到限制;后者具有 5 ~ 6 个自由度,分 DC 伺服和 AC 伺服两种形式,能在可到达的工作区间内任意调整焊钳姿态,以适应多种形式结构的焊接。点焊机器人控制系统由本体控制部分及焊接控制部分组成。
了解更多安川机器人
