 平台热线
平台热线



目前, 在我国的机床上下料机器人主要为ABB、FANUC、 YASKAWA 等进口厂商产品, 我国自主研发的关节式上下料机 器人数量所占比例极小。 本文研究对象为关节式六自由度机床 上下料机器人,在设计过程中,对机床上下料机器人产业及上下 料机器人相关关键零部件的市场作较为详细的调研。 对六自由 度关节式机床上下料机器人主体结构进行设计与研究。
1 机床上下料机 器人的设计要求, 提出关节 式机床上下料机器人的初步 设计简图,见图 1。 整个机器 人的本体结构形式为串联型 单开链结构, 具有六个转动 自由度。 在设计中主要将机 器人本体结构划分了 4 个功 能模块:底座、手臂、手腕和执行机构。
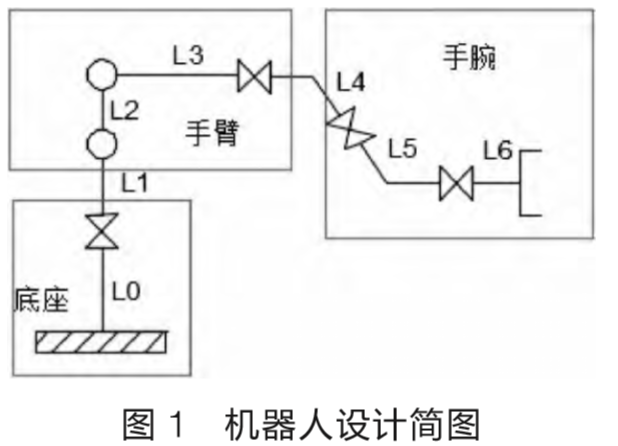
机器人各自由度的驱动装置主要采用电机驱动。 主要完成 的动作有腰部回转、大臂回转、小臂倾转、小臂回转、腕部仰俯及 腕部回转。机器人的执行装置安装在手部位置,现设计的执行机 构为扇形齿轮连杆式手爪,由气缸进行驱动,可以应用于数控车 床的自动上下料工作场合。当操作对象发生变化时,可以更换不 同的手部结构,以满足不同机床的工作要求。 在不同工作场合,同种用途的工业机器人的选择也不一样。 同种用途的工业机器人根据操作目标、操作空间、反应灵敏度会 分为很多种类型。因此,我们在选择一种工业机器人进行作业时 一定要了解所选机器人的主要技术参数, 包括执行机构*大负 载、*大作业范围、*大速度及定位精度等。
2 关节式上下料机器人执行机构设计
由设计任务知, 该机器人所执行的主要工作任务为实现数控车床加工过程中的自动 上下料。 众所周知,数控车 床所加工的主要物料是棒 料, 所以将关节式机床上 下料的执行机构设计为外 夹钳抓手, 与工件的接触 形式为外部夹持, 采用的 结构形式为扇形齿轮连杆 式,在抓手上安装 橡胶垫片以防止在工件夹 持过程中机械爪手金属部 位直接与加工工件接触而损坏零件的表面质量, 从而保证工件 的表面精度要求。

了解更多安川机器人
